100 Days of CUDA
My Notes and codes documentation for CUDA learning journey
Summary of Day 16:
*Start of Chapter 7: Convolution
Convolution: What is it?
Convolution is an array operation where each output element is a weighted sum of an input element and its neighboring elements, using a filter array (convolution filter). Convolutions can be applied to 1D (audio), 2D (images), or 3D (video) data.
1D Convolution
- A 1D convolution operates on a 1D array, where each output element is computed as a weighted sum of an input element and its surrounding elements, based on a convolution filter.
- The filter size is always odd $(2r + 1)$, where $r$ is the filter radius, meaning the calculation is symmetric around the central element.
- Example:
- Input: $x= [8,2,5,4,1,7,3]$
- Filter: $f= [1,3,5,3,1]$
- Output $y$ is computed as an inner product between $x$ and $f$ over the corresponding positions.
- For example;
- $y[2] = (1\times 8) + (3 \times 2) + (5 \times 5) + (3 \times 4)+ (1 \times 1) = 52$
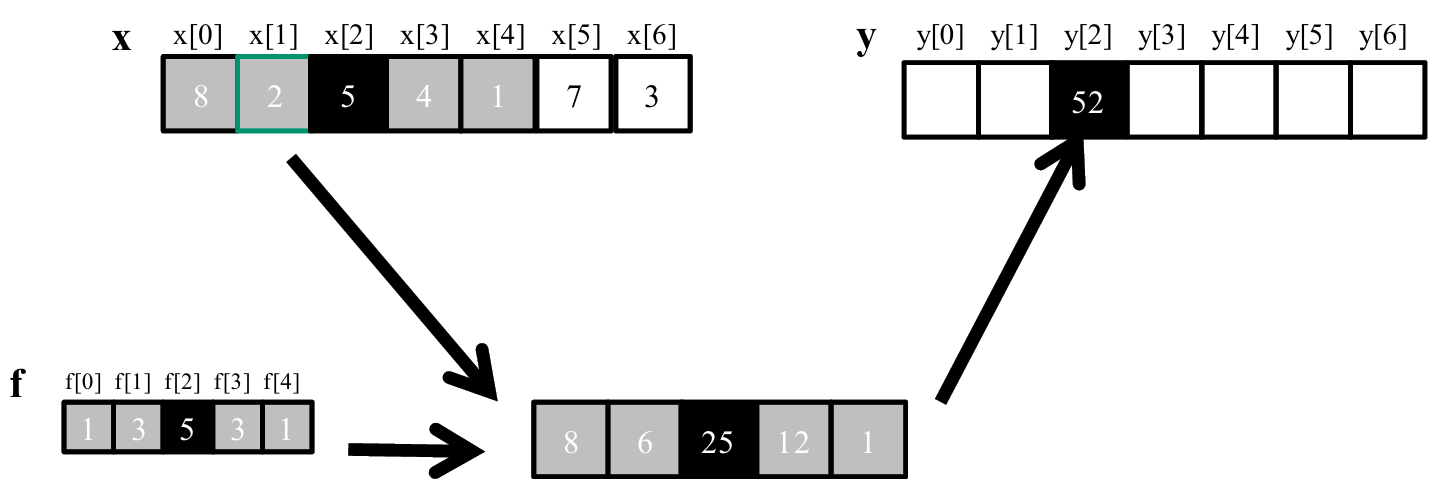
Fig 16.01: 1D Convolution Example illustratory diagram.
Boundary Conditions in 1D Convolution
- $y[2] = (1\times 8) + (3 \times 2) + (5 \times 5) + (3 \times 4)+ (1 \times 1) = 52$
- At array boundaries, missing elements must be handled:
- Zero-padding: Assume missing values are $0$ (commonly used in audio processing).
- Edge-padding: Extend the edge value to fill missing elements.
- Example: $y[1]$ is computed with a missing left-side element assumed to be $0$.
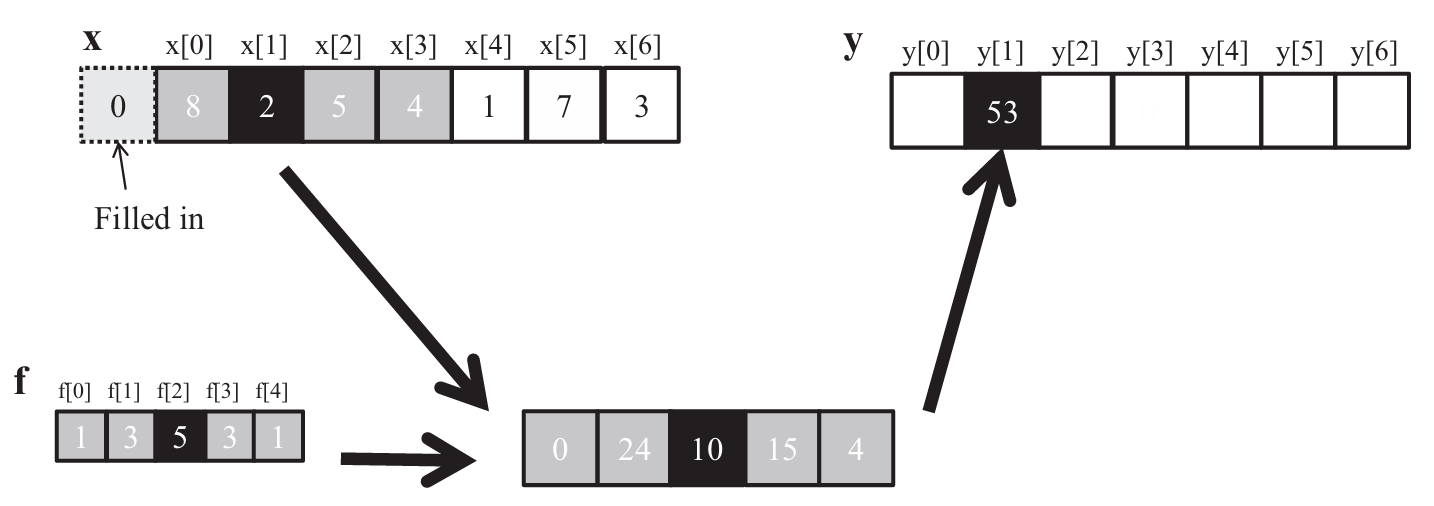
Fig 16.02: 1D Convolution Boundary Condition
Click here to see the code implementation for 1D Convolution with Boundary Condition (Zero padded) enabled.
2D Convolution
- In image processing, convolution is applied to 2D arrays (matrices) where each pixel interacts with its neighbors.
- A 2D filter of size $(2r_{x} + 1, 2r_{y} + 1)$ determines the weighted sum calculation.
P_{y,x} = \sum_{j= -r_{y}}^{r_y} \sum_{k= -r_x}^{r_x} f_{j+r_y, k+r_x} \times N_{y+j, x+k} - Example:
- A $5×5$ filter is applied to a matrix, and each output element is computed as a sum of element-wise products of the filter and a submatrix from the input.
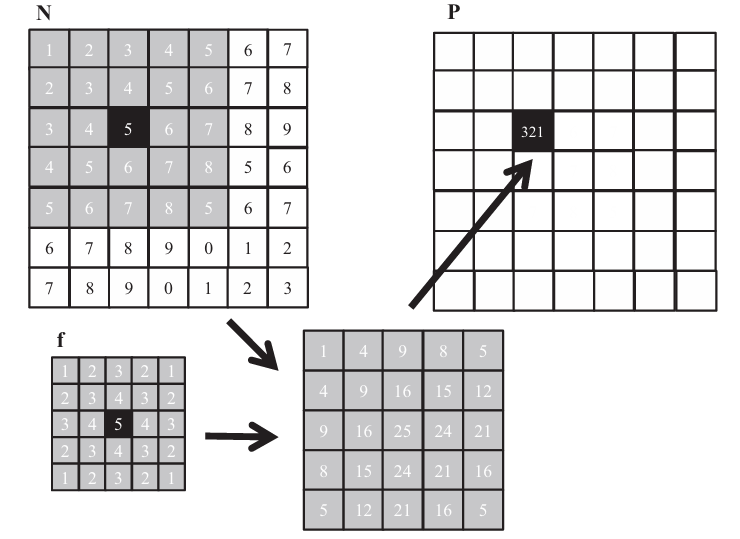
Fig 16.03: 2D Convolution Example
\begin{aligned} P_{2,2} = \space & N_{0,0} \times M_{0,0} + N_{0,1} \times M_{0,1} + N_{0,2} \times M_{0,2} + N_{0,3} \times M_{0,3} + N_{0,4} \times M_{0,4} +\\ & N_{1,0} \times M_{1,0} + N_{1,1} \times M_{1,1} + N_{1,2} \times M_{1,2} + N_{1,3} \times M_{1,3} + N_{1,4} \times M_{1,4} +\\ & N_{2,0} \times M_{2,0} + N_{2,1} \times M_{2,1} + N_{2,2} \times M_{2,2} + N_{2,3} \times M_{2,3} + N_{2,4} \times M_{2,4} +\\ & N_{3,0} \times M_{3,0} + N_{3,1} \times M_{3,1} + N_{3,2} \times M_{3,2} + N_{3,3} \times M_{3,3} + N_{3,4} \times M_{3,4} +\\ & N_{4,0} \times M_{4,0} + N_{4,1} \times M_{4,1} + N_{4,2} \times M_{4,2} + N_{4,3} \times M_{4,3} + N_{4,4} \times M_{4,4} \\ \end{aligned}= 1+4+9+8+5+4+9+16+15+12+9+16+25+24+21+8+15+24+21+16+5+12+21+16+5= 321Boundary Conditions in 2D Convolution
- A $5×5$ filter is applied to a matrix, and each output element is computed as a sum of element-wise products of the filter and a submatrix from the input.
- Boundaries exist in both x and y dimensions, leading to more complex conditions.
- Missing elements at edges can be handled similarly to 1D:
- Zero-padding: Assume missing values are 0.
- Edge-padding: Use the nearest pixel value.
- These boundary conditions impact the efficiency of tiling in parallel computing.
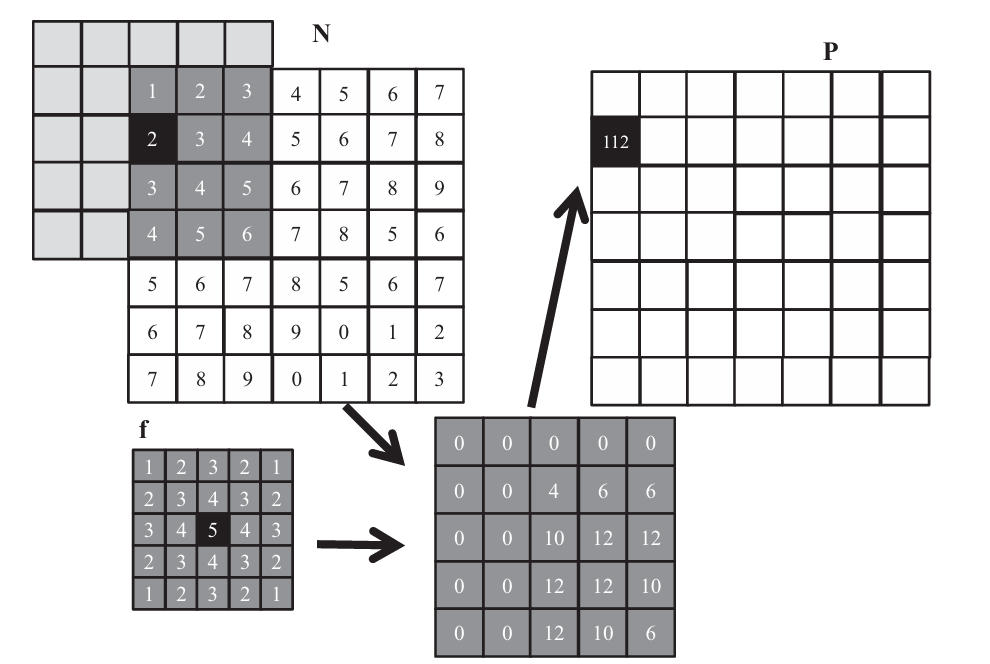
Fig 16.04: 2D Convolution Boundary Condition
Click here to see the code implementation for 2D Convolution with Boundary Condition (Zero padded) enabled.